Lühikese hingega hoova põhilüliti

-

Kõrge täpsus
-

Täiustatud elu
-

Laialdaselt kasutatav
Toote kirjeldus
Hingedega hoovaga lüliti pakub laiemat ulatust ja paindlikkust käivitamisel. Hoova disain võimaldab lihtsat aktiveerimist ja sobib ideaalselt rakendustesse, kus ruumipiirangud või ebamugavad nurgad raskendavad otsest käivitamist. Seda kasutatakse tavaliselt kodumasinates ja tööstusjuhtimissüsteemides.
Mõõtmed ja tööomadused
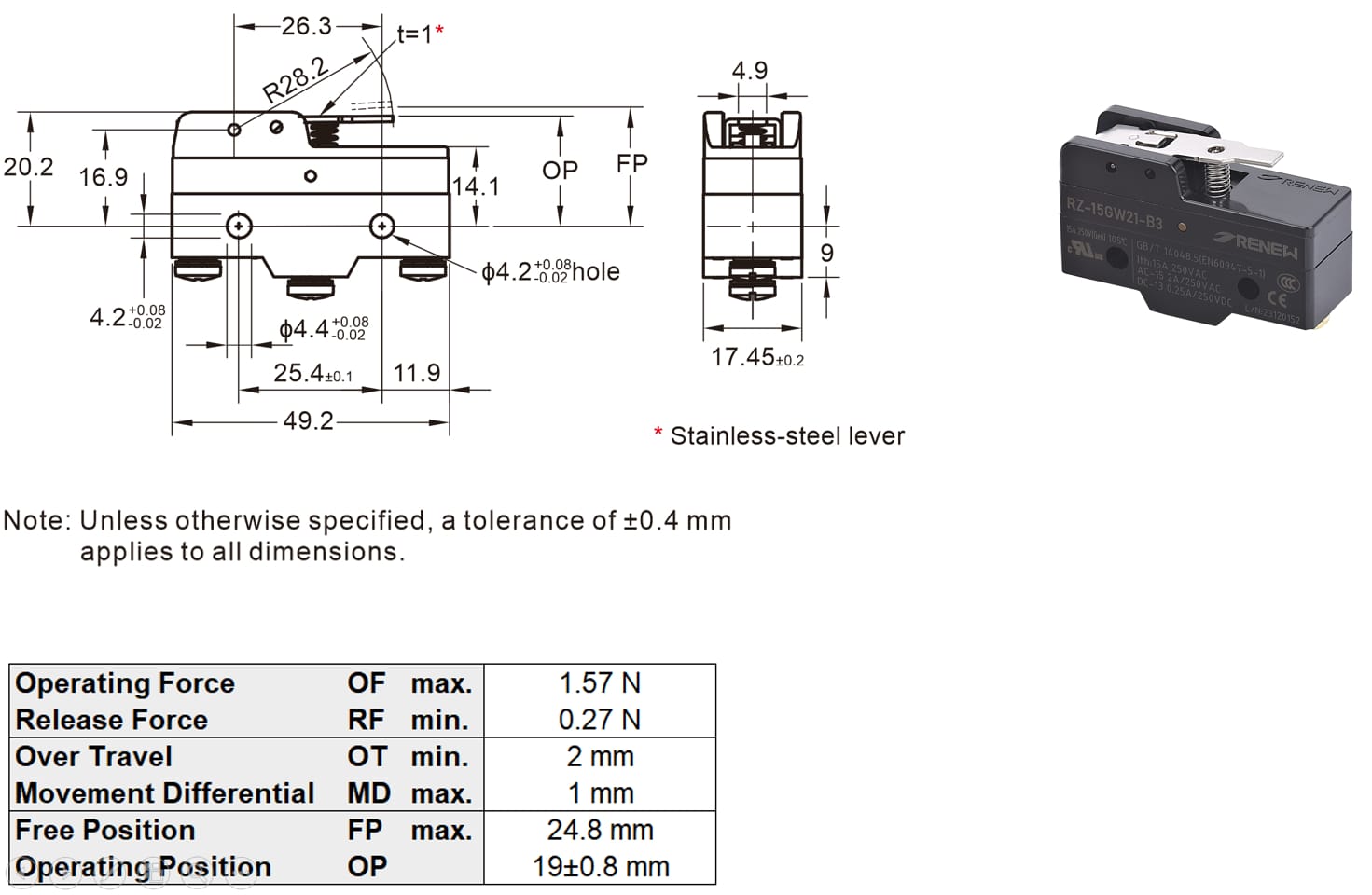
Üldised tehnilised andmed
| Hinnang | 15 A, 250 V vahelduvvool |
| Isolatsioonitakistus | 100 MΩ min (500 V alalisvoolu juures) |
| Kontakttakistus | 15 mΩ maks. (algväärtus) |
| Dielektriline tugevus | Sama polaarsusega kontaktide vahel Kontaktide vahe G: 1000 VAC, 50/60 Hz 1 minuti jooksul Kontaktide vahe H: 600 VAC, 50/60 Hz 1 minuti jooksul Kontaktide vahe E: 1500 VAC, 50/60 Hz 1 minuti jooksul |
| Voolu juhtivate metallosade ja maanduse vahel ning iga klemmi ja voolu mitte juhtivate metallosade vahel 2000 V vahelduvvool, 50/60 Hz 1 minuti jooksul | |
| Vibratsioonikindlus rikete korral | 10 kuni 55 Hz, 1,5 mm kahekordne amplituud (rike: max 1 ms) |
| Mehaaniline eluiga | Kontaktide vahe G, H: min 10 000 000 lülitust. Kontaktide vahe E: 300 000 toimingut |
| Elektriline eluiga | Kontaktide vahe G, H: min 500 000 lülitust. Kontaktide vahe E: min 100 000 lülitust. |
| Kaitseaste | Üldotstarbeline: IP00 Tilkumiskindel: samaväärne IP62-ga (välja arvatud klemmid) |
Taotlus
Renew'i põhilülititel on oluline roll erinevate seadmete ohutuse, täpsuse ja töökindluse tagamisel erinevates valdkondades. Siin on mõned populaarsed või potentsiaalsed rakendused.

Andurid ja jälgimisseadmed
Kasutatakse sageli tööstusliku kvaliteediga andurites ja jälgimisseadmetes rõhu ja voolu juhtimiseks, toimides seadmete sees klõpsmehhanismina.

Tööstusmasinad
Kasutatakse tööpinkides seadmete maksimaalse liikumise piiramiseks ja toorikute asukoha tuvastamiseks, tagades täpse positsioneerimise ja ohutu töö töötlemise ajal.
Liigendrobotilised käed ja haaratsid
Integreeritud liigendrobotkäte külge juhtimissõlmedes kasutamiseks ning lõpp-punkti ja ruudustiku stiilis juhtimiseks. Integreeritud robotkäe randme haaratsitesse haardesurve tuvastamiseks.













